

100% in the browser
No installs, no Docker, no Python env to break. Open a tab and start working.
Visual robot design and physics simulation
Quickly visualize and edit your robot's physical properties with real-time physics in the browser.
No install · Local-first by default · Optional cloud sync
Why Critter Engine
No installs, no Docker, no Python env to break. Open a tab and start working.
Use the editor without an account and keep projects in browser storage or local .critter files. Sign in when you want cloud save, autosave history, or share links.
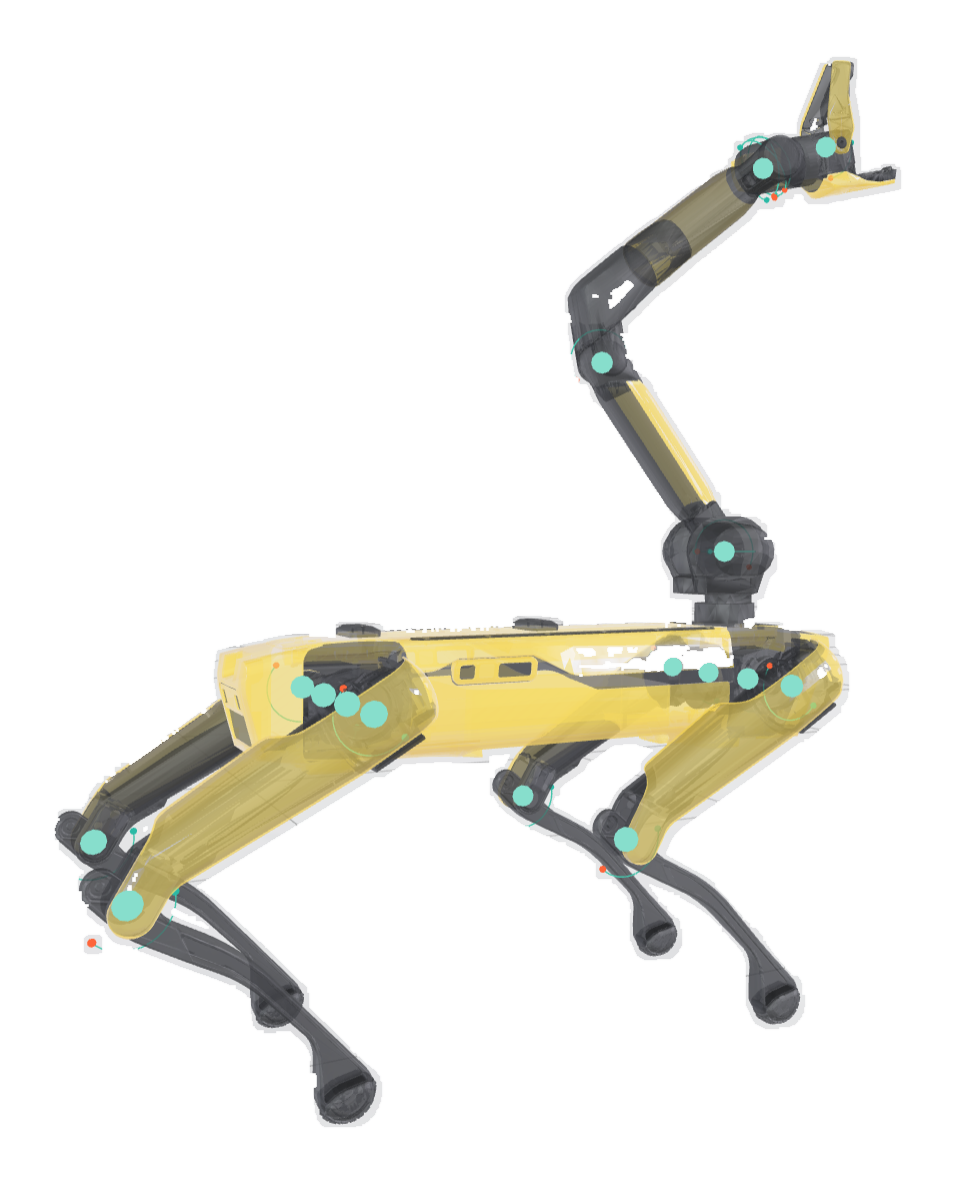
Stop hunting through text files for one wrong number. Quickly visualize bodies, joints, sites, collisions, tendons, and inertias, and edit them on the spot.
Built on MuJoCo
Critter Engine is built on MuJoCo. If you already work in MuJoCo, Critter Engine fits your stack without locking you in.
Running natively in your browser.
Bring in MJCF/XML models with meshes, or import many URDF/Xacro robot packages with referenced meshes and config files. Critter expands supported Xacro patterns in the browser and flags missing dependencies.
Export clean MJCF/XML compatible with current MuJoCo 3.x runtimes.
Franka Panda and FR3, UR5e and UR10e, KUKA iiwa, Boston Dynamics Spot, Unitree Go2/G1/H1, Agility Cassie, Agilex Piper, and more, plus grippers and hands.
Add or edit common MuJoCo sensors for sites, joints, actuators, tendons, subtrees, and clocks, then inspect live sensordata and export recordings as JSON or CSV.
What you can do with Critter Engine
Toggle overlays for collisions, sites, joint axes, tendons, and inertias. Click to inspect and edit.
Drag in robots, grippers, props, and terrain, or build from scratch. Visually tune every part of a robot's physics model.
Move any joint with a live slider. Watch the actuators respond in real time, with or without physics running.
Mount a virtual camera on any body, preview the live feed, snapshot stills, and record video clips of the simulation.
Press play and watch the constraints do their job. Press stop and your scene returns to exactly where it started.
Save locally as a portable .critter project, or sign in to save cloud versions, restore autosaves, and create read-only or editable share links.
FAQ
By default, projects and uploaded assets stay in your browser storage and in files you download, such as .critter project archives. If you sign in and use cloud save, Critter stores project versions and referenced assets in Critter cloud so you can reopen or share them. Cloud storage is optional, and local export still works without an account.
No for local editing, importing, simulation, and exporting. Yes for cloud projects, cloud autosave history, and share links.
The latest two versions of Chrome, Edge, Firefox, and Safari.
Yes. Import MJCF/XML with meshes, plus many URDF and Xacro robot projects. URDF/Xacro support is compatibility-focused, so ROS/Gazebo-specific simulator metadata may be reported and skipped.
Not yet. Today it's focused on design and simulation. Training is on the roadmap.
Yes. The in-browser editor is the heart of the product and we intend to keep it free. Optional cloud or team features may become paid add-ons as the product grows.
Critter Engine
No install · Local-first by default · Optional cloud sync